浅谈程序跑飞
我们原来最早调试51的时候,碰到程序跑飞了就不管了,那个时候认为程序跑飞是概率事件,所以没有考虑其跑飞的真正原因。最近发现aarch64架构的bl指令,非常容易导致程序跑飞。本文复现这种跑飞的情况,用来说明一个非常常见的跑飞现象,并且给出解决思路。 同样,思考以前调试51的时候,跑飞很可能是芯片的一些特性导致的问题。只怪当时知识尚浅,无法理解。
跑飞的代码
本文以rtems上的汇编为例,当然可以在linux中复现,本文就不在linux重复实验了,问题一样会出现,如下是代码diff
diff --git a/bsps/aarch64/shared/start/start.S b/bsps/aarch64/shared/start/start.S index 0a89d85035..04e2b1a8fa 100644 --- a/bsps/aarch64/shared/start/start.S +++ b/bsps/aarch64/shared/start/start.S @@ -43,6 +43,18 @@ .globl _start .section ".bsp_start_text", "ax" +kylin_call: + mov x0, xzr + ret + +kylin_out_of_control: + mov x0, xzr + bl kylin_call + mov x0, xzr + ret + /* Start entry */ _start: @@ -341,6 +353,8 @@ _start: /* Branch to start hook 1 */ bl bsp_start_hook_1 + bl kylin_out_of_control + /* Branch to boot card */ mov x0, #0 bl boot_card
上面的代码我定义了一个kylin_out_of_contrl标签,通过bl来跳转此标签,然后在kylin_out_of_control中,添加了一个没有意义的指令来代替其他指令,没有意义的指令是将x0清空。然后调用kylin_call标签,在kylin_call中继续将x0清空后返回到kylin_out_of_control,然后kylin_out_of_control内继续调用x0清空来代替其他指令,最后返回。
思考
根据我们对汇编的理解,上面的代码完全正常,bl是跳转指令,ret返回指令,mov移动指令。每个指令简单易懂,这些代码为什么组合会跑飞呢。可以思考一下
关于x30寄存器
为了理解这个问题,我们需要了解x30寄存器。在aapcs中我们可以知道x30作为lr寄存器,这个寄存器保存的是上一个函数调用pc值的+4,也就是 last_pc + 4 的值。这里出现跑飞的原因是x30寄存器不正常了。
那么我们可以思考,为什么x30会不正常?
关于ret指令
我们知道ret指令是返回指令,那么有一个问题,ret指令它会操作系统寄存器吗(x0-x30寄存器)?
aarch64的定义上,ret没有提到会操作寄存器,我们看看ret的说明如下:
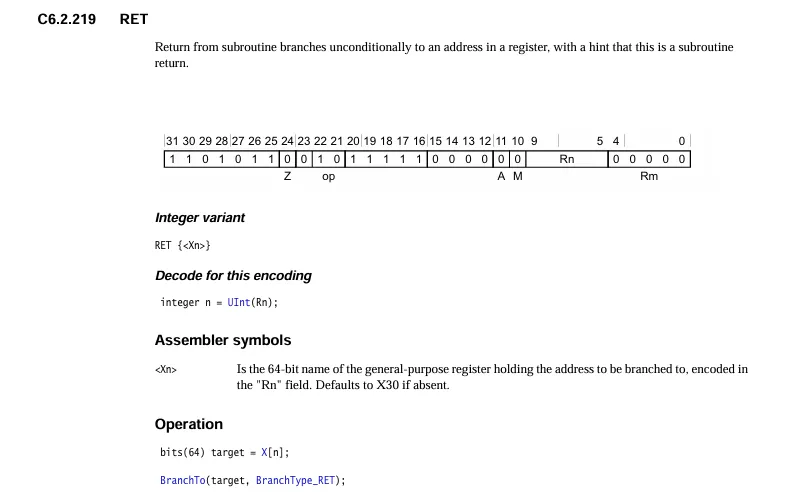
根据上面的信息,我们知道ret默认返回x30寄存器。完全没问题啊,不会操作任何寄存器
那么问题就出来了,ret不会操作寄存器,但是我们bl进入的时候,会根据aapce记录x30寄存器为原pc+4。也就是会改写x30寄存器。
发现没有,x30寄存器会被aapcs改写,但是不会在ret还原。所以真相是:
如果bl出现嵌套,那么两次ret时,最外层的函数的x30和内层函数的x30相等,那么程序就一直在这里打转。于是出现了跑飞现象
演示
上面文字介绍不是很直观,下面开始演示
qemu运行rtems
如下
qemu-system-aarch64 -no-reboot -nographic -serial mon:stdio -machine xlnx-zcu102 -m 4096 -smp 4 -kernel build/aarch64/zynqmp_qemu/testsuites/libtests/kylinos.exe -s -S
挂gdb
gdb开始监测
aarch64-rtems6-gdb build/aarch64/zynqmp_qemu/testsuites/libtests/malloctest.exe
挂上断点
(gdb) b kylin_out_of_control Breakpoint 1 at 0x18008: file ../../../bsps/aarch64/shared/start/start.S, line 51. (gdb) c Continuing. Thread 1 hit Breakpoint 1, kylin_out_of_control () at ../../../bsps/aarch64/shared/start/start.S:51 51 mov x0, xzr (gdb) l 46 kylin_call: 47 mov x0, xzr 48 ret 49 50 kylin_out_of_control: 51 mov x0, xzr 52 //mov x19, x30 53 bl kylin_call 54 //mov x30, x19 55 mov x0, xzr
盯住x30寄存器
此时x30寄存器为
(gdb) x/x $x30 0x180e4 <_start+204>
这里还是一切正常,x30正好是_start+200 + 4
此时进入kylin_call,如下
(gdb) x/x $x30 0x18010 <kylin_out_of_control+8>:
然后我们第一个ret返回,如下
(gdb) s kylin_out_of_control () at ../../../bsps/aarch64/shared/start/start.S:55 55 mov x0, xzr (gdb) x/x $x30 0x18010 <kylin_out_of_control+8>: 0xaa1f03e0 (gdb) disassemble Dump of assembler code for function kylin_out_of_control: 0x0000000000018008 <+0>: mov x0, xzr 0x000000000001800c <+4>: bl 0x18000 <bsp_vector_table_begin> => 0x0000000000018010 <+8>: mov x0, xzr 0x0000000000018014 <+12>: ret End of assembler dump.
可以看到在kylin_out_of_control中了,但是异常出现了,kylin_out_of_control函数中的x30寄存器并不是我们认为的_start+204,而是kylin_out_of_control+8
按照代码逻辑,即将在0x0000000000018014处调用ret,而这个ret默认找的x30是kylin_out_of_control+8。程序会死循环了。也就是我们说的跑飞了。
确认一下x0-x30常规寄存器
为了说明这个问题,我们需要看看两次bl和ret是否是bl修改了x30,而ret不会修改任何寄存器。信息如下
第一个bl,进入kylin_out_of_control时,寄存器如下
x1 0x0 0 x2 0xffffffffffffffe8 -24 x3 0x1030c0 1061056 x4 0x103128 1061160 x5 0x4 4 x6 0x4 4 x7 0xf 15 x8 0x1c 28 x9 0x4 4 x10 0x3c0 960 x11 0x3fffffff 1073741823 x12 0x0 0 x13 0x8000000000 549755813888 x14 0x40000000 1073741824 x15 0x200000 2097152 x16 0x0 0 x17 0x0 0 x18 0x0 0 x19 0x0 0 x20 0x0 0 x21 0x0 0 x22 0x0 0 x23 0x0 0 x24 0x0 0 x25 0x0 0 x26 0x0 0 x27 0x0 0 x28 0x0 0 x29 0x0 0 x30 0x180e4 98532
然后再一个bl进入kylin_call函数,我们查看x0-x30如下
x0 0x0 0 x1 0x0 0 x2 0xffffffffffffffe8 -24 x3 0x1030c0 1061056 x4 0x103128 1061160 x5 0x4 4 x6 0x4 4 x7 0xf 15 x8 0x1c 28 x9 0x4 4 x10 0x3c0 960 x11 0x3fffffff 1073741823 x12 0x0 0 x13 0x8000000000 549755813888 x14 0x40000000 1073741824 x15 0x200000 2097152 x16 0x0 0 x17 0x0 0 x18 0x0 0 x19 0x0 0 x20 0x0 0 x21 0x0 0 x22 0x0 0 x23 0x0 0 x24 0x0 0 x25 0x0 0 x26 0x0 0 x27 0x0 0 x28 0x0 0 x29 0x0 0 x30 0x18010 98320
发现没有,bl寄存器会修改x30寄存器。
然后我们看第一个ret后的寄存器,此时应该在函数kylin_call的ret后,也就是kylin_out_of_control中
x0 0x0 0 x1 0x0 0 x2 0xffffffffffffffe8 -24 x3 0x1030c0 1061056 x4 0x103128 1061160 x5 0x4 4 x6 0x4 4 x7 0xf 15 x8 0x1c 28 x9 0x4 4 x10 0x3c0 960 x11 0x3fffffff 1073741823 x12 0x0 0 x13 0x8000000000 549755813888 x14 0x40000000 1073741824 x15 0x200000 2097152 x16 0x0 0 x17 0x0 0 x18 0x0 0 x19 0x0 0 x20 0x0 0 x21 0x0 0 x22 0x0 0 x23 0x0 0 x24 0x0 0 x25 0x0 0 x26 0x0 0 x27 0x0 0 x28 0x0 0 x29 0x0 0 x30 0x18010 98320
可以发现,此时寄存器和bl后的寄存器完全一致,x30没有发生改变
然后查看第二次ret的寄存器信息
x0 0x0 0 x1 0x0 0 x2 0xffffffffffffffe8 -24 x3 0x1030c0 1061056 x4 0x103128 1061160 x5 0x4 4 x6 0x4 4 x7 0xf 15 x8 0x1c 28 x9 0x4 4 x10 0x3c0 960 x11 0x3fffffff 1073741823 x12 0x0 0 x13 0x8000000000 549755813888 x14 0x40000000 1073741824 x15 0x200000 2097152 x16 0x0 0 x17 0x0 0 x18 0x0 0 x19 0x0 0 x20 0x0 0 x21 0x0 0 x22 0x0 0 x23 0x0 0 x24 0x0 0 x25 0x0 0 x26 0x0 0 x27 0x0 0 x28 0x0 0 x29 0x0 0 x30 0x18010 98320
完全没有变化,而且代码回到了bl后的地址上。详细如下
(gdb) disassemble Dump of assembler code for function kylin_out_of_control: 0x0000000000018008 <+0>: mov x0, xzr 0x000000000001800c <+4>: bl 0x18000 <bsp_vector_table_begin> => 0x0000000000018010 <+8>: mov x0, xzr 0x0000000000018014 <+12>: ret End of assembler dump. (gdb) s 56 ret (gdb) disassemble Dump of assembler code for function kylin_out_of_control: 0x0000000000018008 <+0>: mov x0, xzr 0x000000000001800c <+4>: bl 0x18000 <bsp_vector_table_begin> 0x0000000000018010 <+8>: mov x0, xzr => 0x0000000000018014 <+12>: ret End of assembler dump. (gdb) s 55 mov x0, xzr (gdb) disassemble Dump of assembler code for function kylin_out_of_control: 0x0000000000018008 <+0>: mov x0, xzr 0x000000000001800c <+4>: bl 0x18000 <bsp_vector_table_begin> => 0x0000000000018010 <+8>: mov x0, xzr 0x0000000000018014 <+12>: ret End of assembler dump.
修复
修复这个问题很简单,我们可以利用x19这种aapcs约定临时存储寄存器来保存x30,如下
diff --git a/bsps/aarch64/shared/start/start.S b/bsps/aarch64/shared/start/start.S index 0a89d85035..f284cf2baa 100644 --- a/bsps/aarch64/shared/start/start.S +++ b/bsps/aarch64/shared/start/start.S @@ -43,6 +43,17 @@ .globl _start .section ".bsp_start_text", "ax" +kylin_call: + mov x0, xzr + ret + +kylin_out_of_control: + mov x19, x30 + bl kylin_call + mov x30, x19 + mov x0, xzr + ret + /* Start entry */ _start: @@ -341,6 +352,8 @@ _start: /* Branch to start hook 1 */ bl bsp_start_hook_1 + bl kylin_out_of_control + /* Branch to boot card */ mov x0, #0 bl boot_card
此时运行代码,系统不再跑飞了。
vanblog的云部署步骤
安装包
apt install docker docker.io docker-compose
设置docker仓库地址
/etc/docker/daemon.json
{ "dns": ["8.8.8.8", "8.8.4.4"], "registry-mirrors": [ "https://docker.m.daocloud.io/", "https://huecker.io/", "https://dockerhub.timeweb.cloud", "https://noohub.ru/", "https://dockerproxy.com", "https://docker.mirrors.ustc.edu.cn", "https://docker.nju.edu.cn", "https://xx4bwyg2.mirror.aliyuncs.com", "http://f1361db2.m.daocloud.io", "https://registry.docker-cn.com", "http://hub-mirror.c.163.com" ] }
运行配置文件
curl -L https://vanblog.mereith.com/vanblog.sh -o vanblog.sh && chmod +x vanblog.sh && ./vanblog.sh
备份
按下10备份即可
10. 备份 VanBlog
此时获得文件 vanblog-backup-20250311153742.tar.gz
恢复
按下11 恢复即可
11. 恢复 VanBlog
至此,全部完成
Waydorid是从anbox演进的新的容器安卓的一种方案,我们的客户想要运行安卓程序,这里描述如何使用waydroid来兼容安卓10的系统
一:编译组件
1.1 下载仓库
git clone https://github.com/waydroid/libglibutil.git git clone https://github.com/waydroid/libgbinder.git git clone https://github.com/waydroid/gbinder-python git clone https://github.com/waydroid/waydroid.git
1.2 编译
apt build-dep . debuild -us -uc
这里 gbinder-python没用changlog,所有需要额外处理一下
dch --create --package "gbinder-python" --newversion "1.0.0~git20210909-1" foo bar dh_make --createorig -p "gbinder-python_1.0.0~git20210909"
1.3 安装
因为waydroid依赖容器,所以需要安装lxc
apt install lxc dpkg -i bridge-utils_1.6-2kylin1_arm64.deb liblxc1_1%3a4.0.2-0kylin1_arm64.deb liblxc-common_1%3a4.0.2-0kylin1_arm64.deb lxc_1%3a4.0.2-0kylin1_all.deb lxc-utils_1%3a4.0.2-0kylin1_arm64.deb
然后安装编译出来的包
dpkg -i libgbinder_1.1.25_arm64.deb libgbinder-tools_1.1.25_arm64.deb libglibutil_1.0.66_arm64.deb python3-gbinder_1.1_arm64.deb waydroid_1.3.0_all.deb
二:修改内核
2.1 binder和ashmem
安卓系统需要binder和ashmem,如果系统安装了linux-module包,可以直接加载,如下
modprobe ashmem_linux modprobe binder_linux
如果linux是可编译的,可以修改config增加如下
CONFIG_ASHMEM=y CONFIG_ANDROID=y CONFIG_ANDROID_BINDER_IPC=y CONFIG_ANDROID_BINDERFS=y
2.2 网络配置
CONFIG_BRIDGE / "802.1d Ethernet Bridging" ('Networking support -> Networking options -> 802.1d Ethernet Bridging') CONFIG_VETH / "Veth pair device" CONFIG_MACVLAN / "Macvlan" CONFIG_VLAN_8021Q / "Vlan" CONFIG_NETFILTER CONFIG_NF_NAT CONFIG_NF_TABLES CONFIG_NFT_NAT CONFIG_NETFILTER_XT_TARGET_CHECKSUM CONFIG_IP_NF_TARGET_MASQUERADE CONFIG_NF_CONNTRACK CONFIG_NETFILTER_XTABLES CONFIG_IP_NF_IPTABLES CONFIG_IP_NF_FILTER CONFIG_IP_NF_MANGLE
如下是kmre启动过程中需要的iptable_nat模块添加的宏:
CONFIG_PACKET=y CONFIG_NETFILTER=y CONFIG_IP_NF_CONNTRACK=y CONFIG_IP_NF_FTP=y CONFIG_IP_NF_IRC=y CONFIG_IP_NF_IPTABLES=y CONFIG_IP_NF_FILTER=y CONFIG_IP_NF_NAT=y CONFIG_IP_NF_MATCH_STATE=y CONFIG_IP_NF_TARGET_LOG=y CONFIG_IP_NF_MATCH_LIMIT=y CONFIG_IP_NF_TARGET_MASQUERADE=y CONFIG_NETFILTER_ADVANCED=y CONFIG_NF_CONNTRACK_IPV4=y
2.3 namespace配置
CONFIG_NAMESPACES / "Namespaces" ('General Setup -> Namespaces support') CONFIG_UTS_NS / "Utsname namespace" ('General Setup -> Namespaces Support / UTS namespace') CONFIG_IPC_NS / "Ipc namespace" ('General Setup -> Namespaces Support / IPC namesapce') CONFIG_USER_NS / "User namespace" ('General Setup -> Namespaces Support / User namespace (EXPERIMENTAL)') CONFIG_PID_NS / "Pid namespace" ('General Setup -> Namespaces Support / PID Namespaces') CONFIG_NET_NS / "Network namespace" ('General Setup -> Namespaces Support -> Network namespace')
2.4 cgroups配置
CONFIG_CGROUP_SCHED / "Cgroup sched" ('General Setup -> Control Group support -> Group CPU scheduler') CONFIG_FAIR_GROUP_SCHED / "Group scheduling for SCHED_OTHER" ('General Setup -> Control Group support -> Group CPU scheduler -> Group scheduling for SCHED_OTHER') CONFIG_BLK_CGROUP / "Block IO controller" ('General Setup -> Control Group support -> Block IO controller') CONFIG_CFQ_GROUP_IOSCHED / "CFQ Group Scheduling support" ('Enable the block layer -> IO Schedulers -> CFQ I/O scheduler -> CFQ Group Scheduling support') CONFIG_CGROUP_CPUACCT / "Cgroup cpu account" ('General Setup -> Control Group support -> Simple CPU accounting cgroup subsystem') CONFIG_MEMCG_SWAP / Memory Resource Controller Swap Extension
2.5 总体配置参考
内核配置可以按照如下脚本检测docker启动必须的脚本:check-config.sh;使用命令如下:
./check-config.sh rockchip_linux_defconfig
配置如下
General setup ---> [*] Control Group support ---> [*] Freezer cgroup subsystem [*] Device controller for cgroups [*] Cpuset support [*] Include legacy /proc/<pid>/cpuset file [*] Simple CPU accounting cgroup subsystem [*] Resource counters [*] Memory Resource Controller for Control Groups [*] Memory Resource Controller Swap Extension [*] Memory Resource Controller Swap Extension enabled by default [*] Enable perf_event per-cpu per-container group (cgroup) monitoring [*] Group CPU scheduler ---> [*] Group scheduling for SCHED_OTHER [*] Group scheduling for SCHED_RR/FIFO <*> Block IO controller -*- Namespaces support [*] UTS namespace [*] IPC namespace [*] User namespace (EXPERIMENTAL) [*] PID Namespaces [*] Network namespace [*] Configure standard kernel features (expert users) [*] Networking support ---> Networking options ---> <M> 802.1d Ethernet Bridging <M> 802.1Q VLAN Support Device Drivers ---> [*] Network device support ---> <M> MAC-VLAN support (EXPERIMENTAL) <M> Virtual ethernet pair device Character devices ---> -*- Unix98 PTY support [*] Support multiple instances of devpts
2.6 必要时开启psi
在cmdline,也就是chosen的bootarge下追加 psi=1,可以降低oom的风险
三:使用说明
3.1 初始化
默认需要下载system.img和vendor.img
如果已存在上述文件,可以直接使用
mkdir -p /usr/share/waydroid-extra/images mv system.img vendor.img /usr/share/waydroid-extra/images/ waydroid init
如果没有system vendor,则会自动下载
下载地址为:https://sourceforge.net/projects/waydroid/files/images/
3.2 体验
使用之前,建议重启一下容器服务,如下:
systemctl restart waydroid-container.service
重启之后,在机器环境下直接启动安卓UI如下
waydroid show-full-ui
3.3 设置属性
安卓容器可以获取/设置属性,通过如下命令
waydroid prop get ro.hardware.egl waydroid prop set ro.hardware.egl=swiftshader
3.4 安装程序
waydroid app install *.apk waydroid app launch com.android.calculator2
3.5 查看日志
waydroid logcat
3.6 进入shell环境
waydroid shell
3.7 其他配置
ro.hardware.gralloc和ro.hardware.egl是选择显卡驱动的。
如果没有选择,默认走gbm和mesa。如果为了兼容,可以走
ro.hardware.gralloc=default ro.hardware.egl=swiftshader
当然不同机器按照实际情况走即可
3.8 X11上启动
waydroid是基于wayland后端,如果要在X11平台启动,则需要启动一个wayland后端,这里可以是weston
然后在weston里面启动waydroid ui即可
飞腾E2000默认可以通过wic格式安装,wic格式按照的方式如下。
一: 制作U盘启动盘
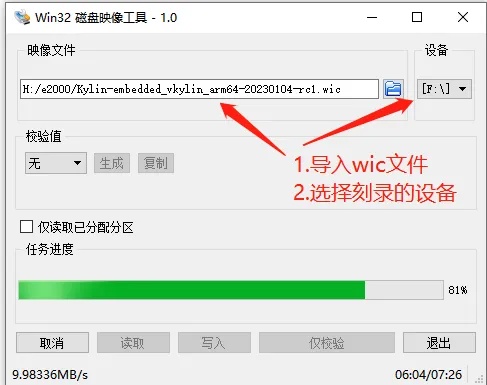
1.1 win上安装wic
Win32DiskImager 可以烧录img格式文件。主要步骤如下
-
a 选择wic文件
-
b 选择需要刻录的设备
-
c 点击写入
1.2 linux上安装wic
将U盘插入机器,通过dd命令直接更新,如下:
sudo dd if=Kylin-embedded_vkylin_arm64-xxxx-rc1.wic of=/dev/sda status=progress
注意这里/dev/sda为U盘识别的块,而不是U盘识别的分区.如果插入U盘是sdb。则这里填写/dev/sdb 以此类推
二:Uboot shell操作
在启动过程中一直按着空格或者enter键,如果是uboot启动就会进入uboot模式
2.1 接入串口
E2000默认的串口波特率为115200,根据实际板子情况接入TTL串口,通过串口功能确保能够正常读写
2.2 进入uboot shell
开机一直按下ctrl+c,直到进入uboot shell,如下所示

2.3 开启识别usb
在 uboot shell中输入 usb start 能够开启USB功能,此时uboot阶段即可正常识别U盘设备,命令如下:
E2000#usb start starting USB... Bus usb3@31a00000: Register 2000110 NbrPorts 2 Starting the controller USB XHCI 1.10 Bus usb3@31a20000: Register 2000110 NbrPorts 2 Starting the controller USB XHCI 1.10 scanning bus usb3@31a00000 for devices... 5 USB Device(s) found scanning bus usb3@31a20000 for devices... 1 USB Device(s) found scanning usb for storage devices... 1 Storage Device(s) found
这里如看到”scanning usb for storage devices... 1 Storage Device(s) found“ 字样,则代表U盘已经识别,如看不到,则检查硬件或uboot驱动
2.4 查看启动盘内容
通过ls 命令可以查看盘符内文件系统内容,如下
ls usb 0:1 / 为查看USB设备第一个盘符的文件内容 ls usb 0:2 / 为查看USB设备第二个盘符的文件内容 E2000#ls usb 0:1 / EFI/ System Volume Information/ 0 file(s), 2 dir(s) E2000#ls usb 0:2 / <DIR> 4096 . <DIR> 4096 .. <DIR> 16384 lost+found <SYM> 7 bin <SYM> 8 sbin <SYM> 7 lib 0 .exectl <DIR> 4096 var <DIR> 4096 usr <DIR> 4096 boot <DIR> 4096 dev <DIR> 4096 etc <DIR> 4096 home <DIR> 4096 proc <DIR> 4096 root <DIR> 4096 run <DIR> 4096 sys <DIR> 4096 tmp <DIR> 4096 mnt <DIR> 4096 srv <DIR> 4096 opt <DIR> 4096 media <DIR> 4096 download
2.5 修改启动参数
setenv bootargs 'console=ttyAMA1,115200 earlycon=pl011,0x2800d000 root=/dev/sda2 rw rootwait security=none';
在Uboot shell中敲入如上命令即可修改开机挂载root分区的具体位置
这里上述参数仅修改root=,用于指定内核挂载操作系统的真实根文件系统位置(root=/dev/sda2),这里通过u盘挂载,则默认可知rootfs位置为/dev/sda2
如不更新内核,在此步骤上,可以直接运行boot命令启动系统。这样能够达到在使用原内核直接启动/dev/sda2的系统的目的。
boot # 该命令使用原来内核启动系统
如果不使用kylin内核,则直接跳转到《三:U盘系统内操作》
2.6 设置内核起始地址
ext4load usb 0:2 $kernel_addr boot/uImage-5.4.18-63-generic;
上述参数,可以更换uboot启动过程中的内核加载uimage的实际文件。这里实际内核文件为uImage-5.4.18-63-generic,存放于usb设备的第二个分区的/boot目录。
注意:内核uImage需适配硬件,否则有概率启动失败
2.7 设置设备树的起始地址
ext4load usb 0:2 $ft_fdt_addr /boot/dtb-5.4.18-63-generic/device-tree/phytium/e2000d-demo-board.dtb
上述参数,可以更换uboot启动过程中加载设备树dtb的实际文件,这里实际设备树文件为e2000d-demo-board.dtb,存放于usb设备的第二个分区的/boot/dtb-5.4.18-63-generic/device-tree/phytium/目录
注意:内核设备树需适配硬件,否则有概率启动失败
2.8 启动新内核
bootm $kernel_addr -:- $ft_fdt_addr
上述参数可以直接将内核启动,通过如上方法,E2000可以正常启动为U盘(sda2)内的系统镜像
2.9 保存环境变量
saveenv
上述命令可以保存uboot中的环境变量,后续每次启动将自动启动,无需重复配置.
当一切就绪后,可使用此保存当前环境变量,U盘启动无需保存,因其仅启动一次,如设置nvme/sata/mmc启动则可保存,以免重复配置
三:U盘系统内操作
3.1 查看U盘根分区
在上述方式通过U盘进入系统之后,进入终端,可以发现系统是通过sda2挂载的。现在需要将其正式的更新到固定磁盘上。
root@kylinos:~# mount /dev/sda2 on / type ext4 (rw,relatime)
3.2更新系统
通过上述命令可以发现,现在已经进入U盘系统中,需要在U盘系统中将系统更新到emmc中,主要如下:
3.2.1 解压wic的tar包
tar xzvf Kylin-embedded_vkylin_arm64-xxxx-rc1.wic.tar.gz
3.2.2 安装wic包
# 目的盘为nvme sudo dd if=Kylin-embedded_vkylin_arm64-xxxx-rc1.wic of=/dev/nvme0n1 status=progress # 目的盘为sata sudo dd if=Kylin-embedded_vkylin_arm64-xxxx-rc1.wic of=/dev/sda status=progress
需要注意的是,这里的of=指定的是真实存在的物理设备,例如/dev/nvme0n1为机器的nvme盘,具体安装情况视当前硬件情况决定
3.2.3 通过复制文件的方式安装
如果不想dd wic文件,可以直接将U盘的根分区内容直接对拷到目的硬盘。例如
cp -raf /run/media/usb_storage/* /rum/media/nvme0np2/
这里/run/media/usb_storage/ 是U盘的根分区挂载,可以通过 mount /dev/sda2 /run/media/usb_storage/挂载
这里/rum/media/nvme0np2/
四:保存Uboot变量
通过上述操作,实际已经安装好系统,现在仅需要进入uboot中,保存自己需要启动的环境变量。从而做到每次开机自动加载即可。
4.1 sata启动
setenv bootargs 'console=ttyAMA1,115200 earlycon=pl011,0x2800d000 root=/dev/sda2 rw rootwait security=none'; setenv load_kernel 'ext4load scsi 0:3 $kernel_addr boot/uImage-5.4.18-63.52-e2000-rc15-generic'; setenv load_fdt 'ext4load scsi 0:3 $ft_fdt_addr boot/dtb/e2000d-demo-board.dtb'; saveenv
4.2 u盘启动
setenv bootargs 'console=ttyAMA1,115200 earlycon=pl011,0x2800d000 root=/dev/sda3 rw rootwait security=none'; setenv load_kernel 'ext4load usb 0:3 $kernel_addr boot/uImage-5.4.18-63.52-e2000-rc15-generic'; setenv load_fdt 'ext4load usb 0:3 $ft_fdt_addr boot/dtb/e2000d-demo-board.dtb'; saveenv
4.3 nvme启动
setenv bootargs 'console=ttyAMA1,115200 earlycon=pl011,0x2800d000 root=/dev/nvme0n1p3 rw rootwait security=none'; setenv load_kernel 'ext4load nvme 0:3 $kernel_addr boot/uImage-5.4.18-63.52-e2000-rc15-generic'; setenv load_fdt 'ext4load nvme 0:3 $ft_fdt_addr boot/dtb/e2000d-demo-board.dtb'; saveenv
4.4 确定环境是否设置成功
printenv可以打印变量,确定自己设置的和打印的是否一致即可。接下来就能正常启动新的系统了。
4.5 登录
第一次登录需要手动运行resize-assistant。用于扩大rootfs分区
默认密码 kylin qwer1234
五:示例
设置启动一共就三步,分别为,设置内核地址,设置设备树地址,设置启动命令,保存配置。通常仅修改加载内核和设备树的地址。 现在示例想系统更新到mmc盘符,主要操作如下: 打印uboot的所有配置:printenv,setenv args "contents"可以配置具体的环境变量,最后saveenv保存环境变量最后重启即可生效
如下是我们配置的usb启动的整个例子可以参考:
E2000#printenv arch=arm baudrate=115200 board=e2000 board_name=e2000 boot_os=bootm $kernel_addr -:- $ft_fdt_addr bootargs=console=ttyAMA1,115200 earlycon=pl011,0x2800d000 \\\ root=/dev/mmcblk0p1 rw rootwait security=none bootcmd=usb start; run load_kernel; run load_fdt; run boot_os bootdelay=2 cpu=armv8 distro_bootcmd=run load_kernel; run load_initrd; run load_fdt; run boot_os eth0addr=00:11:22:33:44:55 eth1addr=10:22:33:44:55:66 eth2addr=10:11:22:33:44:55 eth3addr=00:22:33:44:55:66 ethaddr=00:11:22:33:44:55 fdtcontroladdr=f9c3f7f0 fileaddr=90100000 filesize=17d0240 ft_fdt_addr=0x90000000 ft_fdt_name=boot/dtb/e2000.dtb gatewayip=202.197.67.1 initrd_addr=0x95000000 ipaddr=202.197.67.2 kernel_addr=0x90100000 load_fdt=ext4load usb 0:2 0x90000000 boot/e2000d-demo-board.dtb load_initrd=ext4load usb 0:2 0x95000000 initrd.img-5.4.18-65-generic load_kernel=ext4load usb 0:2 0x90100000 boot/uImage-kylin loadaddr=0x90000000 netdev=eth0 netmask=255.255.255.0 serverip=202.197.67.3 stderr=uart@2800d000 stdin=uart@2800d000 stdout=uart@2800d000 vendor=phytium Environment size: 1047/4092 bytes
备注:
bootargs=console=ttyAMA1,115200 earlycon=pl011,0x2800d000 \\\ root=/dev/mmcblk0p1 rw rootwait security=none
/dev/mmcblk0p1为系统分区,可以从内核串口log中可以看到,如果找不到rootfs可以查看此处
load_fdt=ext4load usb 0:2 0x90000000 boot/e2000d-demo-board.dtb load_kernel=ext4load usb 0:2 0x90100000 boot/uImage-kylin
e2000d-demon-board.dtb和uImage两个文件我们可以手动复制到u盘中的/boot/目录下,根据cpu的不同e2000d,e2000q,e2000s可以选择不同的dtb文件
5.1 设置U盘启动
setenv load_kernel 'ext4load usb 0:2 $kernel_addr boot/uImage-5.4.18-63-generic'; setenv load_fdt 'ext4load usb 0:2 $ft_fdt_addr boot/e2000d-demo-board.dtb'; setenv bootcmd 'usb start; run load_kernel; run load_fdt; run boot_os' setenv boot_os 'bootm $kernel_addr -:- $ft_fdt_addr' saveenv
这里设置了内核地址为U盘的 boot/uImage-5.4.18-63-generic,设备树地址为 U盘的 boot/e2000d-demo-board.dtb,启动命令为 bootm ft_fdt_addr
5.2 刻录wic
dd if=Kylin-embedded_vkylin_arm64_rc1_20230419.wic of=/dev/mmcblk0 status=progress
5.3 重设为mmc启动
setenv load_kernel 'ext4load mmc 0:2 $kernel_addr boot/uImage-5.4.18-63-generic'; setenv load_fdt 'ext4load mmc 0:2 $ft_fdt_addr boot/e2000d-demo-board.dtb'; setenv bootcmd 'usb start; run load_kernel; run load_fdt; run boot_os' setenv boot_os 'bootm $kernel_addr -:- $ft_fdt_addr' saveenv
5.4 安装成功
通过上述设置,下次启动则可以正常加载新的系统。
通常e2000的机器,设备树默认使用机器本身的,内核使用麒麟和客户自身的均可以,系统必须指定为麒麟系统即可完成正常安装
